void setConfig(uint16_t settings, uint8_t value) { __SPI_CS_ENABLE__(); for (int i = 0; i < DEVICES; i++) { SPI_Transmit(SPI1, settings | value); } __SPI_CS_DISABLE__(); }
void clear_display() { uint16_t col; int bit;
for (col = 0x100; col <= 0x800; col += 0x100) { for (bit = 0; bit < 8; bit++) { __SPI_CS_ENABLE__(); for (int i = 0; i < 4; i++) { SPI_Transmit(SPI1, col | (0 << bit & 0xFF)); } __SPI_CS_DISABLE__(); } } } void setup() { // put your setup code here, to run once: SystemCoreClockUpdate(); HAL_Init();
for (int j = 0; j < 8; j++) { for (int k = 0x100; k <= 0x800; k += 0x100) { __SPI_CS_ENABLE__(); for (int i = 0; i < 4; i++) { SPI_Transmit(SPI1, k | (1 << j & 0xFF)); } __SPI_CS_DISABLE__(); } HAL_Delay(100); }
for (int j = 7; j >= 0; j--) { for (int k = 0x100; k <= 0x800; k += 0x100) { __SPI_CS_ENABLE__(); for (int i = 0; i < 4; i++) { SPI_Transmit(SPI1, k | (1 << j & 0xFF)); } __SPI_CS_DISABLE__(); } HAL_Delay(100); }
for (int k = 0x100; k <= 0x800; k += 0x100) { __SPI_CS_ENABLE__(); for (int i = 0; i < 4; i++) { SPI_Transmit(SPI1, k | (0x00 & 0xFF)); } __SPI_CS_DISABLE__(); }
for (int k = 0x100; k <= 0x800; k += 0x100) { __SPI_CS_ENABLE__(); for (int i = 0; i < 4; i++) { SPI_Transmit(SPI1, k | (0xFF & 0xFF)); } __SPI_CS_DISABLE__(); HAL_Delay(100); __SPI_CS_ENABLE__(); for (int i = 0; i < 4; i++) { SPI_Transmit(SPI1, k | (0x00 & 0xFF)); } __SPI_CS_DISABLE__(); }
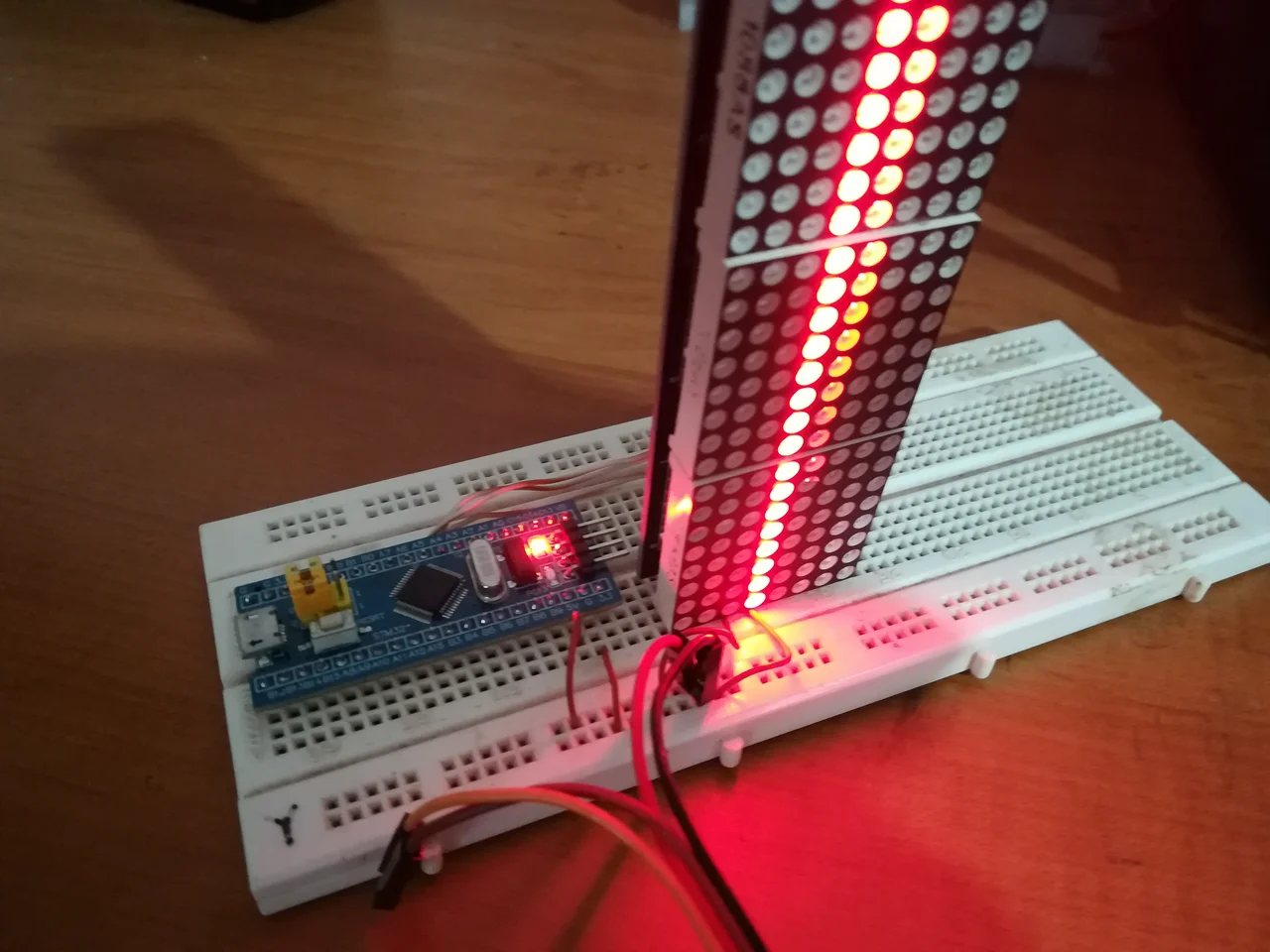
This is to test output module for the 8 bit computer. Improved the cycle count per operation by adding an OR gate to reset if there are no operations.
Music: https://www.bensound.com
Music Source:
Wintersong by Alexander Nakarada | https://www.serpentsoundstudios.com
Music promoted by https://www.free-stock-music.com
Attribution 4.0 International (CC BY 4.0)
https://creativecommons.org/licenses/by/4.0/
Very rare video of a blue magpie from a Canon 60X zoom camera.
Music Source:
www.bensound.com
https://www.bensound.com/royalty-free-music/track/once-again
This is to try out a 8 bit computer with using logisim. I got inspired by 8 bit computer tutorial by https://open.lbry.com/@beneater:6?r=6drb1jBA1VU8qCCUVziCayXEaFN12TEu .
This compuer has 64 byte ROM , 128 byte RAM.
In this simple demo video
lda 0f
sub 0e
sta 81
jumpz 00
jmp 02
Meaning:
load 0x0f memory location data to registerA
substract with data in memory location 0x0e
store data in register A to memory location 0x81
if register A equal to zero jump to 0x00 program memory location
jump to memory location 0x02
Summary: get one number and then substract it with another number until it is zero and restart the program from the begining. meanwhile the answer is written to the RAM location 0x81.
Can download the source files from https://open.lbry.com/@bluepill:c/PC2:2?r=6drb1jBA1VU8qCCUVziCayXEaFN12TEu
My flower photo slide show 1
Music Source:
Now We Ride by Alexander Nakarada | https://www.serpentsoundstudios.com
Music promoted by https://www.free-stock-music.com
Attribution 4.0 International (CC BY 4.0)
https://creativecommons.org/licenses/by/4.0/